Mastering the game of Go without Human Knowledge
写在最前:本人还是小菜一枚,本文只简要描述了alphago zero中的关键技术,而且也都是我个人的理解,理解不对的地方还请大神指出,如果大家有什么问题的话,也可以直接在评论区留言
1. 文章简介
这是一篇deepmind发在nature上的paper,论文描述了最新版本的AlphaGo,命名为AlphaGo
Zero,AlphaGo Zero在与战胜李世石版的AlphaGo lee的对局中,打出了100:0的惊人战绩。
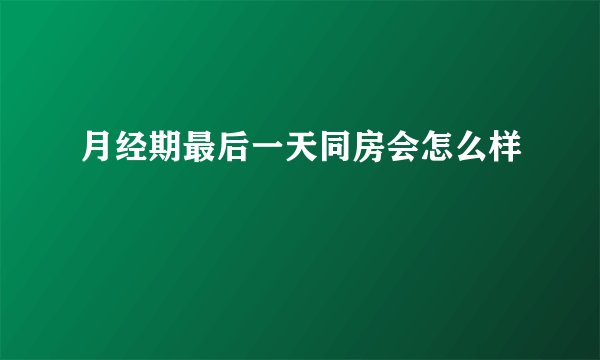
如图1所示,AlphaGo Zero在训练3天之后就超越了AlphaGo
Lee,在训练了不到30天的时候就超越了AlphaGo Master,之后,AlphaGo Zero的性能还在进一步缓慢提升。
1.1 AlphaGo Zero的主要改进
相比于之前的AlphaGo,AlphaGo Zero主要的改进有:
1. 将之前的AlphaGo中的两套网络合并为一套,在之前的AlphaGo中,采用了actor网络和critic网络,而在AlphaGo Zero中,这两套网络合二为一,同时输出所有动作的选择概率和状态s的价值。
2. AlphaGo Zero中没有使用任何人工经验,也就是没有使用supervised learning来做预训练,完全使用reinforcement learning自学习。而在之前的AlphaGo中,先使用很多盘人类高手之间的对局作为training data来预训练AlphaGo中的网络,训练完之后再让AlphaGo使用reinforcement learning进一步学习。
3. 之前的AlphaGo中,状态s的维度比较高(19*19*n,n是多少忘记了,好像是48),这是因为其中包含了很多维人工设计的特征,而在AlphaGo Zero中,状态s的维度是19*19*17,并没有人工设计的特征。
1.2 本文中的一些参数
动作空间:362维(19*19+1),每个交叉点上都可以落子,而且还有一个pass动作(跳过这一步,让对手下),但是有些交叉点上可能已经有棋子了,那为啥每个交叉点上都可以落子呢?不要急,在MCTS时会忽略那些非法的动作。
对弈规则:本文中,棋局会在博弈的双方都选择pass时,或者到了最大步数19*19*2时终止。
状态:本文中的状态的维度是19*19*17,状态s由 组成,其中 表示本方上一步走棋之后的棋局状态, 表示对方上一步走棋之后的棋局状态, 用来表示当前该哪一方走棋。
reward:围棋是零和游戏,因此赢的一方可以得到1的reward,而失败的一方得到-1的reward。
2. 方法细节
2.1 neural Network
AlphaGo Zero使用了resnet的网络结构,网络结构如下:
其中p表示362个动作的概率,整个neural Network的计算可用下面公式表示,其中 表示network的参数。
2.2 search算法
MCTS的tree中的每个节点s都存储当前节点所有可行的动作对应的edges:(s,a),每个edge包含如下的信息:
其中 表示在节点s选择动作a的次数, 是由MCTS算出的该edge的累计行为价值, 表示MCTS计算出的该edge的平均价值, 表示状态s下,选择行为a的先验概率(这个概率由network输出,并添加了一定的噪声)。这4个值在MCTS开始时,初始化为
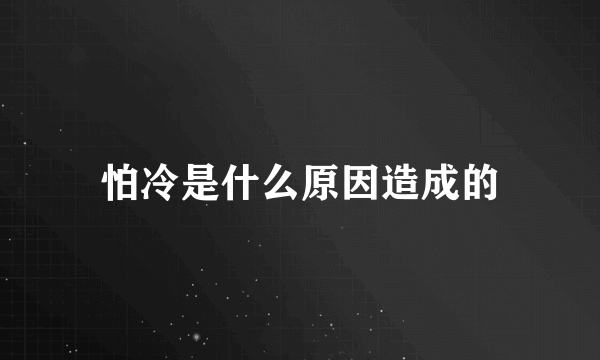
search的整个流程可由下图表示:
其中a、b、c三个过程重复执行1600次,最后的d是在搜索结束之后真实的选择行为。在论文中,作者使用了多线程来搜索。
a. Select
首先从root节点 执行搜索,向下搜索L次,得到叶子节点 ,注意,这里的L次是针对每个搜索线程的,不是所有线程的全部搜索次数。每次搜索时选择一个当前节点的可执行动作a(根据围棋规则),而不是从362个动作空间中选,因为这362个动作中有一些动作是不能选的。动作的选择由下面公式来确定
其中 由下面公式计算
参数 代表了select动作时的exploration的程度(如果exploration太小的话,select的动作的空间就被局限在一小部分空间中了,可能无法select到最优的行为)。
当MCTS第一次开始搜索时,由于所有edge的 被初始化为0,因此,此时行为的选择由 决定,而 又主要由 和 决定,所以在MCTS的搜索初期, 越大, 越小,那么行为a被选择的可能就会增大,保证了搜索算法的exploration性能。MCTS的搜索后期,由于 被持续更新趋向于真实值,因此,在后期,搜索主要由 决定。
更通俗的解释:人在下棋过程中也会向前推演几步,人在推演的过程中所依据的就是直觉(类似于AlphaGo Zero网络输出的动作选择概率),比如在root节点处,人类感觉走哪一步会比较好,就会在推演中走这一步,然后再自己分析对方可能会走在哪里,然后再自己根据直觉再走一步...,但是在推演的过程中,可能走了几步之后感觉局面变差了(AlphaGo Zero网络输出的状态价值比较低),于是重头推演,重头推演的时候,动作的选择就不一样了,当走了几步之后发现局面变好了,那人类就会认为这样的下棋走法比较好,但是又怕自己推演的还不够全面,可能还有更好的走法,于是就推演很多种不同的走法(exploration),最后,人类会发现一种比较好的走法,但是在实际中,这样的推演对计算能力的要求太高,也就只有计算机能够完成,人类也只能推演少数走法。
b. Expand and evaluate
将select到的叶子节点 加入到队列中,通过neural network计算该叶子节点的价值,如:
其中 表示对节点 的变换(起data augmentation的作用,在围棋中,棋局旋转90°的整数倍、棋局翻转不会影响棋局)。
注意当网络在计算节点的状态价值时,搜索线程需要被暂时lock。
叶子节点处的向下搜索的edges被初始化为
c. Backup
将上一步中计算出的叶子节点的价值向后传播,传播的结果就是从root节点 到叶子节点 的整个搜索路径上搜索到的节点都被更新了一遍,更新公示如下:
d. Play
在a、b、c循环执行了1600次之后,AlphaGo Zero在root节点处选择真实的落子动作,动作选择的概率如下式所示
参数 用于控制动作选择的随机性,用于控制exploration的程度。
对该公式的理解就是,在之前的搜索模拟过程中,哪个动作被更多的采用,那么在真实的动作选择时,这个动作就更容易被选择到,因为在搜索的后期,动作的选择主要由 决定,所以,在搜索过程中, 大的动作的 也会更大一些,那么在选择真实动作时,就会间接的更倾向于选择 大的动作。
在执行完这真实的一步动作之后,当前的新节点变为MCTS的新root节点,重新回到前面的a、b、c阶段,从新的root节点往下搜索。
2.3 self play
Self play包括3部分,每一部分都使用多线程并行执行,如下:
1. optimisation:
neural network的参数 不断地使用最新的self play的数据来优化更新,使得网络输出的动作选择概率以及状态价值更可靠(类似于人的直觉,专业棋手的直觉相对于业余棋手对于棋局的判断的直觉更准确,这是因为专业棋手经过了更多的训练),本文使用了64个GPU线程(workers),每个线程都有自己的网络参数,所以就有64个 ,每个worker的训练数据是从最近的50万盘self play的棋局中随机抽取的,其batch_size是32。每训练1000步,保存一个checkpoint。
2. evaluator:
为了保证self play的棋局数据是目前最优的,我们需要评估每个worker的性能,假如某个worker优于现在最好的worker,那么就让这个worker作为当前最好的worker,并让这个最好的worker生成后续的self play的棋局数据。评估的办法就是让这两个worker对弈,如果参数为 的worker对参数为 的worker的取胜概率超过了55%,那么就认为这个 的worker优于 的worker。
3. self-play:
当前最好的worker用于生成25000局的self-play data,在self play过程中,每一步都执行1600个MCTS来选择最终的真实动作,作者说这1600个MCTS仿真大约需要执行0.4s,在每一局中的前30步,将 设置为1,之后将 设置为一个很小的数,用于改变exploration的程度。另外,作者还通过给root节点的动作选择概率添加噪声的方法来增加exploration。另外,作者为了降低计算量,会有90%的几率将肯定会输的棋局提前放弃。
2.4 learning
通过search方法,可以得到很多训练数据 ,每个状态s都对应一个由search输出的动作选择概率 和该状态的价值 ,就可以使用这些training data来训练neural Network,公式如下:
参数c用于防止neural Network的过拟合。